Agents And Environments
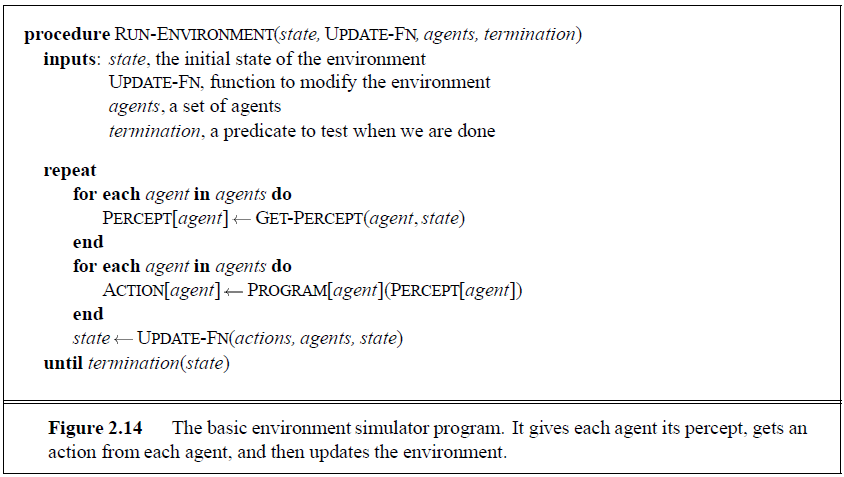
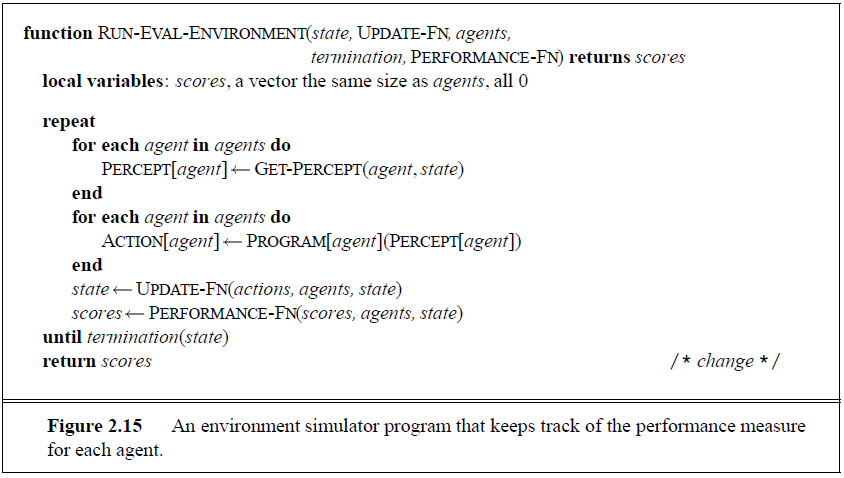
works by a simple accumulation using either summation, averaging, or taking a maximum. For example, if the performance measure for a vacuum-cleaning agent is the total amount of dirt cleaned in a shift, scores will just keep track of how much dirt has been cleaned up so far. returns the performance measure for a a single environment, defined by a single initial state and a particular update function. Usually, an agent is designed to
work in an environment class, a whole set of different environments. For example, we design a chess program to play against any of a wide collection of human and machine opponents. If we designed it for a single opponent, we might be able to take advantage of specific weaknesses in that opponent, but that would not give us a good program for general play. Strictly speaking, in order to measure the performance of an agent, we need to have an environment generator that selects particular environments (with certain likelihoods) in which to run the agent. We are then interested in the agent’s average performance over the environment class. This is fairly straightforward to implement for a simulated environment, and Exercises 2.5 to 2.11 take you through the entire development of an environment and the associated measurement process. A possible confusion arises between the state variable in the environment simulator and the state variable in the agent itself (see REFLEX-AGENT-WITH-STATE). As a programmer implementing both the environment simulator and the agent, it is tempting to allow the agent to peek at the environment simulator’s state variable. This temptation must be resisted at all costs! The agent’s version of the state must be constructed from its percepts alone, without access to the complete state information.