Goal Based Agents
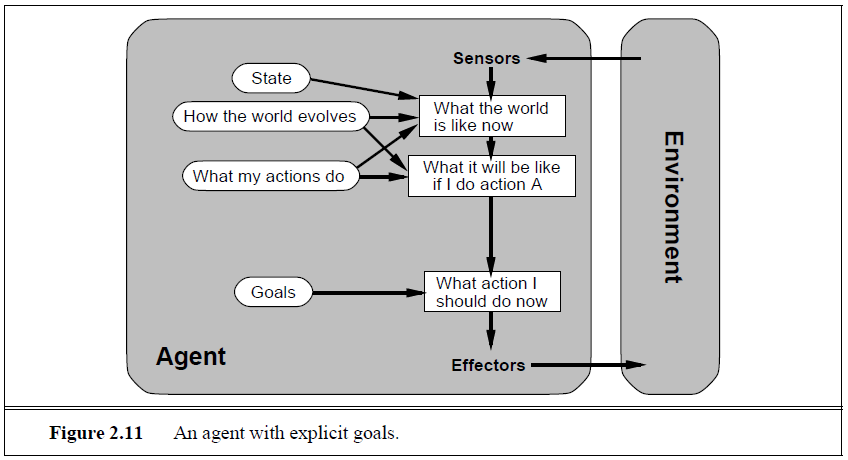
Goal-based agents: Knowing about the current state of the environment is not always enough to decide what to do. For example, at a road junction, the taxi can turn left, right, or go straight on. The right decision depends on where the taxi is trying to get to. In other words, as well as a current state description, the agent needs some sort of goal information, which describes situations that are desirable— for example, being at the passenger’s destination. The agent program can combine this with information about the results of possible actions (the same information as was used to update internal state in the reflex agent) in order to choose actions that achieve the goal. Sometimes this will be simple, when goal satisfaction results immediately from a single action; sometimes, it will be more tricky, when the agent has to consider long sequences of twists and turns to find a way to achieve the goal. Search (Chapters 3 to 5) and planning are the subfields of AI devoted to finding action sequences that do achieve the agent’s goals.
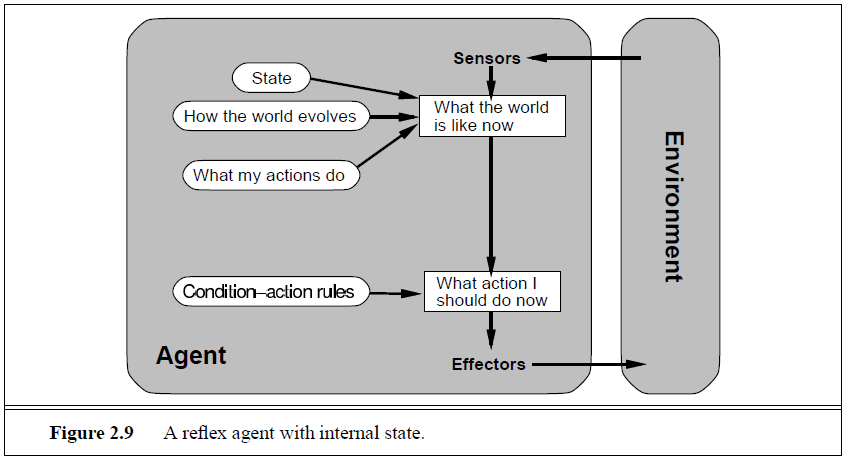
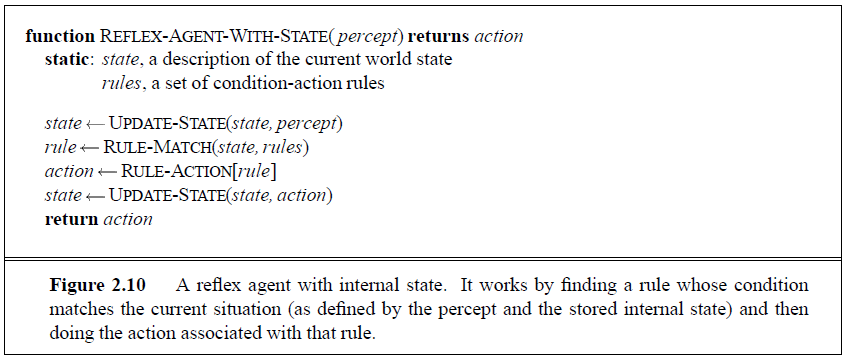
Notice that decision–making of this kind is fundamentally different from the condition– action rules described earlier, in that it involves consideration of the future—both “What will happen if I do such-and-such?” and “Will that make me happy?” In the reflex agent designs, this information is not explicitly used, because the designer has precomputed the correct action for various cases. The reflex agent brakes when it sees brake lights. A goal-based agent, in principle, could reason that if the car in front has its brake lights on, it will slow down. From the way the world usually evolves, the only action that will achieve the goal of not hitting other cars is to brake. Although the goal-based agent appears less efficient, it is far more flexible. If it starts to rain, the agent can update its knowledge of how effectively its brakes will operate; this will automatically cause all of the relevant behaviors to be altered to suit the new conditions. For the reflex agent, on the other hand, we would have to rewrite a large number of condition–action rules. Of course, the goal-based agent is also more flexible with respect to reaching different destinations. Simply by specifying a new destination, we can get the goal-based agent to come up with a new behavior. The reflex agent’s rules for when to turn and when to go straight will only work for a single destination; they must all be replaced to go somewhere new. Figure 2.11 shows the goal-based agent’s structure.