Path Consistency (K-consistency)
Path Consistency (K-Consistency): Given that arc consistency is not enough to eliminate the need for backtracking, is there another stronger degree of consistency that may eliminate the need for search? The above example shows that if one extends the consistency test to two or more arcs, more inconsistent values can be removed.
A graph is K-consistent if the following is true: Choose values of any K-1 variables that satisfy all the constraints among these variables and choose any Kth variable. Then there exists a value for this Kth variable that satisfies all the constraints among these K variables. A graph is strongly K-consistent if it is J-consistent for all J<=K.
Node consistency discussed earlier is equivalent to strong 1-consistency and arc-consistency is equivalent to strong 2-consistency (arc-consistency is usually assumed to include node-consistency as well). Algorithms exist for making a constraint graph strongly K-consistent for K>2 but in practice they are rarely used because of efficiency issues. The exception is the algorithm for making a constraint graph strongly 3-consistent that is usually refered as path consistency. Nevertheless, even this algorithm is too hungry and a weak form of path consistency was introduced.
A node representing variable Vi is restricted path consistent if it is arc-consistent, i.e., all arcs from this node are arc-consistent, and the following is true: For every value a in the domain Di of the variable Vi that has just one supporting value b from the domain of incidental variable Vj there exists a value c in the domain of other incidental variable Vk such that (a,c) is permitted by the binary constraint between Vi and Vk, and (c,b) is permitted by the binary constraint between Vk and Vj.
The algorithm for making graph restricted path consistent can be naturally based on AC-4 algorithm that counts the number of supporting values. Although this algorithm removes more inconsistent values than any arc-consistency algorithm it does not eliminate the need for search in general. Clearly, if a constraint graph containing n nodes is strongly n-consistent, then a solution to the CSP can be found without any search. But the worst-case complexity of the algorithm for obtaining n-consistency in a n-node constraint graph is also exponential. If the graph is (strongly) K-consistent for K<n, then in general, backtracking cannot be avoided, i.e., there still exist inconsistent values.
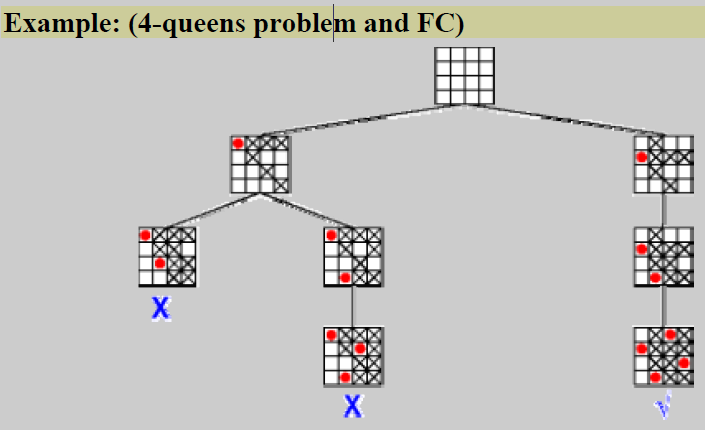
Forward Checking: Forward checking is the easiest way to prevent future conflicts. Instead of performing arc consistency to the instantiated variables, it performs restricted form of arc consistency to the not yet instantiated variables. We speak about restricted arc consistency because forward checking checks only the constraints between the current variable and the future variables. When a value is assigned to the current variable, any value in the domain of a "future" variable which conflicts with this assignment is (temporarily) removed from the domain. The advantage of this is that if the domain of a future variable becomes empty, it is known immediately that the current partial solution is inconsistent. Forward checking therefore allows branches of the search tree that will lead to failure to be pruned earlier than with simple backtracking. Note that whenever a new variable is considered, all its remaining values are guaranteed to be consistent with the past variables, so the checking an assignment against the past assignments is no longer necessary.
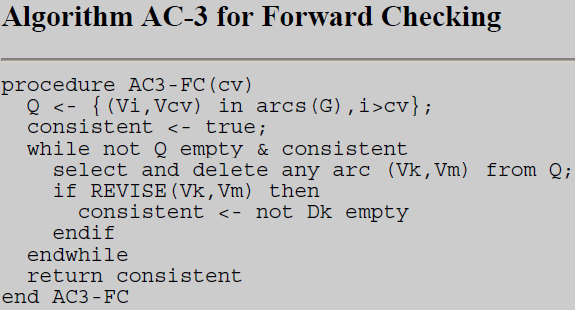
Forward checking detects the inconsistency earlier than simple backtracking and thus it allows branches of the search tree that will lead to failure to be pruned earlier than with simple backtracking. This reduces the search tree and (hopefully) the overall amount of work done. But it should be noted that forward checking does more work when each assignment is added to the current partial solution.
Forward checking is almost always a much better choice than simple backtracking.