←
Artificial Intelligence
Planning As Search
Planning as Search: There are two main approaches to solving planning problems, depending on the kind of search space that is explored:
- 1. Situation-space search
- 2. Planning-space search
Situation-Space Search: In situation space search
- the search space is the space of all possible states or situations of the world
- initial state defines one node
- a goal node is a state where all goals in the goal state are satisfied
- a solution plan is the sequence of actions (e.g. operator instances) in the path from the start node to a goal node
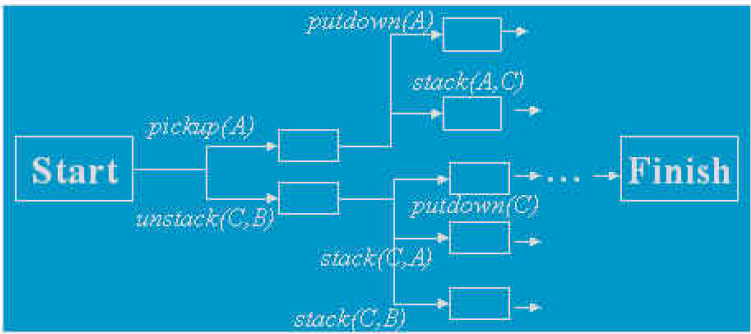
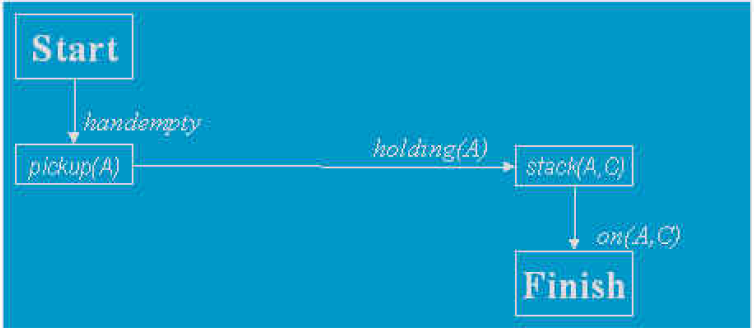
Plan-Space Search
- the search space is the space of all possible plans
- a node corresponds to a partial plan
- initially we will specify an "initial plan" which is one node in this space
- a goal node is a node containing a plan which is complete, satisfying all of the goals in the goal state
- the node itself contains all of the information for determining a solution plan (e.g. sequence of actions)