Planning Systems
Planning Systems: Classical Planners use the STRIPS (Stanford Research Institute Problem Solver) language to describe states and operators. It is an efficient way to represent planning algorithms.
Representation of States and Goals: States are represented by conjunctions of function-free ground literals, that is, predicates applied to constant symbols, possibly negated.
An example of an initial state is:
At(Home) /\ -Have(Milk) /\ -Have(Bananas) /\ -Have(Drill) /\ ...
A state description does not have to be complete. We just want to obtain a successful plan to a set of possible complete states. But if it does not mention a given positive literal, then the literal can be assumed to be false. Goals are a conjunction of literals. Therefore the goal is
At(Home) /\ Have(Milk) /\ Have(Bananas) /\ Have(Drill)
Goals can also contain variables. Being at a store that sells milk is equivalent to
At(x) /\ Sells(x,Milk)
We have to differentiate between a goal given to a planner which is producing a sequence of actions that makes the goal true if executed, and a query given to a theorem prover that produces true or false if there is truth in the sentences, given a knowledge base.
We also have to keep track of the changes rather than of the states themselves because most actions change only a small part of the state representation.
Representation of Actions
Strips operators consist of three components
- action description: what an agent actually returns to the environment in order to do something.
- precondition: conjunction of atoms (positive literals), that says what must be true before an operator can be applied.
- effect of an operator: conjunction of literals (positive or negative) that describe how the situation changes when the operator is applied.
An example action of going from one place to another:
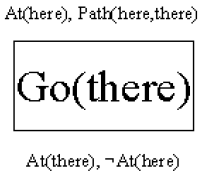
Op(ACTION:Go(there), PRECOND:At(here) /\ Path(here, there) EFFECT:At(there) /\ -At(here))
The following figure shows a diagram of the operator Go(there). The preconditions appear above the action, and the effects below.
Operator Schema: an operator with variables.
- it is a family of actions, one for each of the different values of the variables.
- every variable must have a value
Preconditions and Effects are restrictive. Operator o is applicable in a state s if every one of the preconditions in o are true in s. An example is if the initial situation includes the literals
At(Home, Path(Home, Supermarket)...
then the action Go(Supermarket) is applicable, and the resulting situation contains the literals
-At(Home),At(Supermarket), Path(Home, Supermarket)...
The result is all positive literals in Effect(o) hold, all literals in s hold and negative literals in Effect(o) are ignored. The set of operators for the “Box World” example problem is shown below:
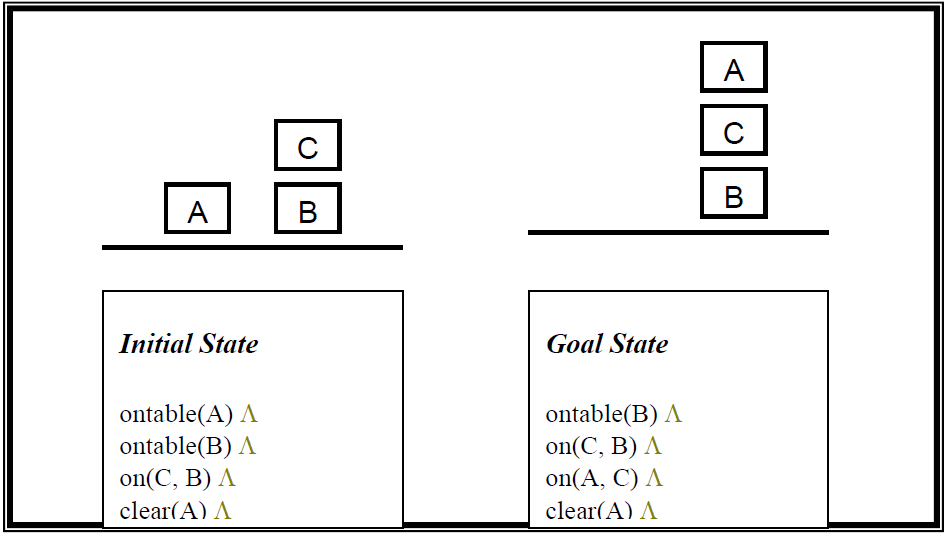
Definitions of Descriptors:
- ontable(x): block x is on top of the table
- on(x,y): block x is on top of block y
- clear(x): there is nothing on top of block x; therefore it can be picked up
- handempty: you are not holding any block
Definitions of Operators:
- Op{ACTION: pickup(x)
- PRECOND: ontable(x), clear(x), handempty
- EFFECT: holding(x), ~ontable(x), ~clear(x), ~handempty }
- Op{ACTION: putdown(x)
- PRECOND: holding(x)
- EFFECT: ontable(x), clear(x), handempty, ~holding(x) }
- Op{ACTION: stack(x,y)
- PRECOND: holding(x), clear(y)
- EFFECT: on(x,y), clear(x), handempty, ~holding(x), ~clear(y) }
- Op{ACTION: unstack(x,y)
- PRECOND: clear(x), on(x,y), handempty
- EFFECT: holding(x), clear(y), ~clear(x), ~on(x,y), ~handempty ) }