Problem Solving Vs. Planning
Problem Solving vs. Planning: A simple planning agent is very similar to problem-solving agents in that it constructs plans that achieve its goals, and then executes them. The limitations of the problem-solving approach motivates the design of planning systems.
To solve a planning problem using a state-space search approach we would let the:
- initial state = initial situation
- goal-test predicate = goal state description
- successor function computed from the set of operators
- once a goal is found, solution plan is the sequence of operators in the path from the start node to the goal node
In searches, operators are used simply to generate successor states and we can not look "inside" an operator to see how it’s defined. The goal-test predicate also is used as a "black box" to test if a state is a goal or not. The search cannot use properties of how a goal is defined in order to reason about finding path to that goal. Hence this approach is all algorithm and representation weak.
Planning is considered different from problem solving because of the difference in the way they represent states, goals, actions, and the differences in the way they construct action sequences.
Remember the search-based problem solver had four basic elements:
- Representations of actions: programs that develop successor state descriptions which represent actions.
- Representation of state: every state description is complete. This is because a complete description of the initial state is given, and actions are represented by a program that creates complete state descriptions.
- Representation of goals: a problem solving agent has only information about it's goal, which is in terms of a goal test and the heuristic function.
- Representation of plans: in problem solving, the solution is a sequence of actions.
In a simple problem: "Get a quart of milk and a bunch of bananas and a variable speed cordless drill" for a problem solving exercise we need to specify: Initial State: the agent is at home without any objects that he is wanting.
Operator Set: everything the agent can do.
Heuristic function: the # of things that have not yet been acquired.
Problems with Problem solving agent:
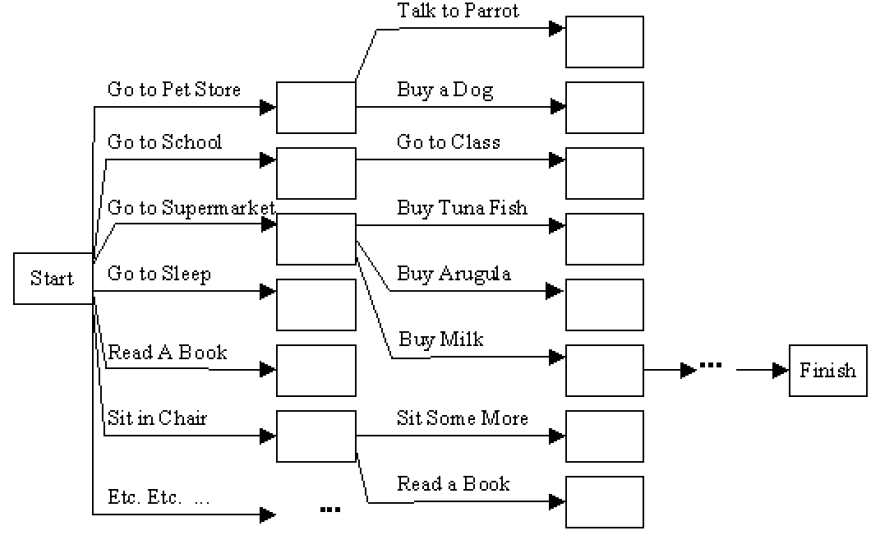
- It is evident from the above figure that the actual branching factor would be in the thousands or millions. The heuristic evaluation function can only choose states to determine which one is closer to the goal. It cannot eliminate actions from consideration. The agent makes guesses by considering actions and the evaluation function ranks those guesses. The agent picks the best guess, but then has no idea what to try next and therefore starts guessing again.
- It considers sequences of actions beginning from the initial state. The agent is forced to decide what to do in the initial state first, where possible choices are to go to any of the next places. Until the agent decides how to acquire the objects, it can't decide where to go.
Planning emphasizes what is in operator and goal representations. There are three key ideas behind planning:
- to "open up" the representations of state, goals, and operators so that a reasoner can more intelligently select actions when they are needed
- the planner is free to add actions to the plan wherever they are needed, rather than in an incremental sequence starting at the initial state.
- most parts of the world are independent of most other parts which makes it feasible to take a conjunctive goal and solve it with a divide-and-conquer strategy.