Working Principles Of Pmmc
Working Principles of PMMC: It has been mentioned that the interaction between the induced field and the field produced by the permanent magnet causes a deflecting torque, which results in rotation of the coil. The deflecting torque produced is described below in mathematical form:
Deflecting Torque: If the coil is carrying a current of , the force on a coil side = BIL N (newton, N). .....EQ(1)
![]() .......EQ(2)
.......EQ(2)
Truly speaking, the equation (2) is valid while the iron core is cylindrical and the air gap between the coil and pole faces of the permanent magnet is uniform. This result the flux density B is constant and the torque is proportional to the coil current and instrument scale is linear.
Controlling Torque: The value of control torque depends on the mechanical design of the control device. For spiral springs and strip suspensions, the controlling torque is directly proportional to the angle of deflection of the coil.

Damping Torque: It is provided by the induced currents in a metal former or core on which the coil is wound or in the circuit of the coil itself. As the coil moves in the field of the permanent magnet, eddy currents are set up in the metal former or core. The magnetic field produced by the eddy currents opposes the motion of the coil. The pointer will therefore swing more slowly to its proper position and come to rest quickly with very little oscillation. Electromagnetic damping is caused by the induced effects in the moving coil as it rotates in magnetic field, provided the coil forms part of closed electric circuit.
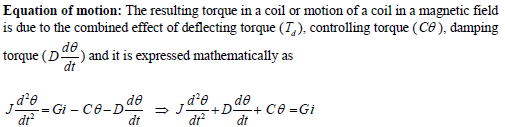
Remarks: When the moving system reached at steady state i.e. at final deflected position, the controlling torque becomes equal and opposite to the deflecting torque. The deflecting angle is directly proportional to the current in the movable coil (see eq. 2). For this reason, the scale of the moving coil instrument is calibrated linearly.