Pd Controllers
PD controllers
Proportional-plus-derivative control of a system with inertia load:
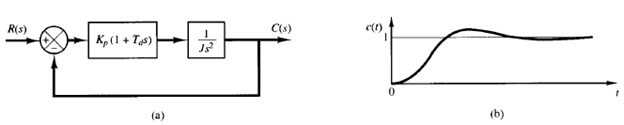
Fig 1: (a) Proportional-plus-derivative control of a system with inertia load; (b) response to a unit step input
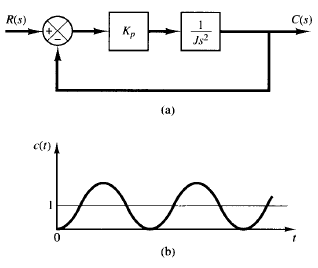
Fig 2: (a) Proportional control of a system with inertia load; (b) response to a unit-step input
Let us modify the proportional controller to a proportional-plus-derivative controller whose transfer function is Kp(1 TdS). The torque developed by the controller is proportional to Kp(e Tde). Derivative control is essentially anticipatory, measures the instantaneous error velocity, and predicts the large overshoot ahead of time and produces an appropriate counteraction before too large an overshoot occurs.
Consider the system shown in Figure 1(a). The closed-loop transfer function is given by
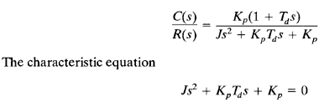
now has two roots with negative real parts for positive values of J, Kp, and Td. Thus derivative control introduces a damping effect. A typical response curve c(t) to a unit-step input is shown in Figure 1(b). Clearly, the response curve shows a marked improvement over the original response curve shown in Figure 2(b).