←
Control Systems - 1
State-space Representation Of Dynamic Systems ( Forcing Function Does Not Involve Derivative Terms)
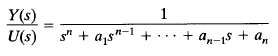
State-space representation of nth-order systems of linear differential equations in which the forcing function does not involve derivative terms:
Consider the following nth-order system:


-abIes is quite convenient. Practically, however, because higher-order derivative terms are inaccurate, due to the noise effects inherent in any practical situations, such a choice of the state variables may not be desirable.)
Let us define

The nth-order system can be written as
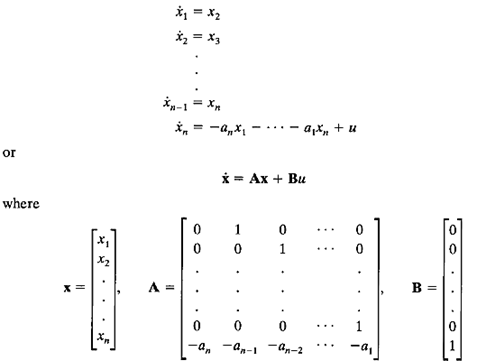
The output can be given by
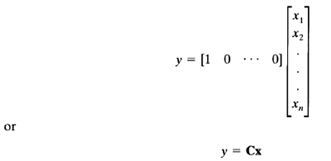
Where, C = [1 0 ... 0]
Note that the state-space representation for the transfer function system