Ziegler-nichols Second Method For Tuning Pid Controllers
Ziegler-Nichols second method for tuning PID controllers
In the second method, we first set Ti = ∞ and Td = 0. Using the proportional control action only (see Figure 1), increase Kp from 0 to a critical value Kcr where the output first exhibits sustained oscillations. (If the output does not exhibit sustained oscillations for whatever value Kp may take, then this method does not apply.) Thus, the critical gain Kcr and the corresponding period Pcr are experimentally determined (see Figure 2). Ziegler and Nichols suggested that we set the values of the parameters Kp , Ti, and Td according to the formula shown in Table 1.
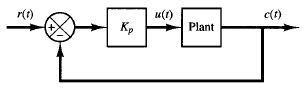
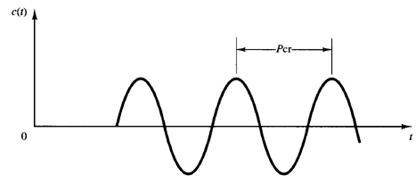
Fig: 1 Closed-loop system with a proportional controller Fig: 2 Sustained oscillation with period Per
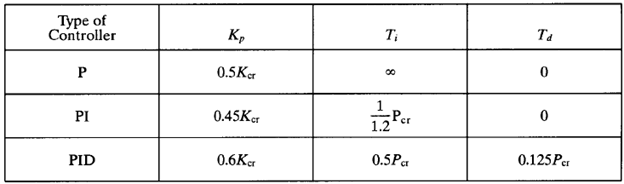
Table 1: Ziegler-Nichols Tuning Rule Based on Critical Gain Kcr and Critical Period Pcr (Second Method)
Notice that the PID controller tuned by the second method of Ziegler-Nichols rules gives
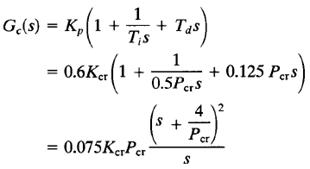
Thus, the PID controller has a pole at the origin and double zeros at S = -4/Pcr.