Scalability And Decision Tree Induction
in the decision tree. The class list remains in memory because it is often accessed and modified in the building and pruning phases. The size of the class list grows proportionally with the number of tuples in the training set. When a class list cannot fit into memory, the performance of SLIQ decreases.
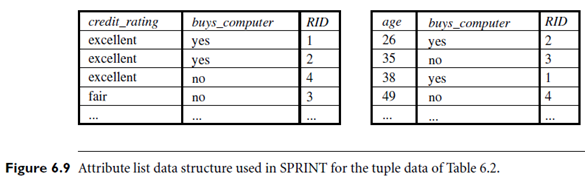
SPRINT uses a different attribute list data structure that holds the class and RID information, as shown in Figure 6.9. When a node is split, the attribute lists are partitioned and distributed among the resulting child nodes accordingly. When a list is partitioned, the order of the records in the list is maintained. Hence, partitioning lists does not require resorting. SPRINT was designed to be easily parallelized, further contributing to its scalability.
While both SLIQ and SPRINT handle disk-resident data sets that are too large to fit into memory, the scalability of SLIQ is limited by the use of its memory-resident data structure. SPRINT removes all memory restrictions, yet requires the use of a hash tree proportional in size to the training set. This may become expensive as the training set size grows.
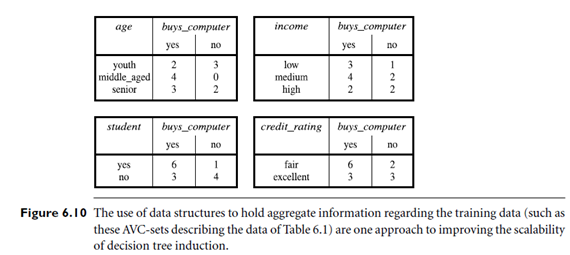
To further enhance the scalability of decision tree induction, a method called Rain- Forest was proposed. It adapts to the amount of main memory available and applies to any decision tree induction algorithm. The method maintains an AVC-set (where AVC stands for “Attribute-Value, Class label”) for each attribute, at each tree node, describing the training tuples at the node. The AVC-set of an attribute A at node N gives the class label counts for each value of A for the tuples at N. Figure 6.10 shows AVC-sets for the tuple data of Table 6.1. The set of all AVC-sets at a node N is the AVC-group of N. The size of an AVC-set for attribute A at node N depends only on the number of distinct values of A and the number of classes in the set of tuples at N. Typically, this size should fit in memory, even for real-world data. Rain Forest has techniques, however, for handling the case where the AVC-group does not fit in memory. Rain Forest can use any attribute selection measure and was shown to be more efficient than earlier approaches employing aggregate data structures, such as SLIQ and SPRINT.
BOAT (Bootstrapped Optimistic Algorithm for Tree Construction) is a decision tree algorithm that takes a completely different approach to scalability—it is not based on the use of any special data structures. Instead, it uses a statistical technique known as “bootstrapping” (Section 6.13.3) to create several smaller samples (or subsets) of the given training data, each of which fits in memory. Each subset is used to construct a tree, resulting in several trees. The trees are examined and used to construct a new tree, T0, that turns out to be “very close” to the tree that would have been generated if all of the original training data had fit in memory. BOAT can use any attribute selection measure that selects binary splits and that is based on the notion of purity of partitions, such as the gini index. BOAT uses a lower bound on the attribute selection measure in order to detect if this “very good” tree, T0, is different from the “real” tree, T that would have been generated using the entire data. It refines T0 in order to arrive at T.
BOAT usually requires only two scans of D. This is quite an improvement, even in comparison to traditional decision tree algorithms (such as the basic algorithm in Figure 6.3), which require one scan per level of the tree! BOAT was found to be two to three times faster than Rain Forest, while constructing exactly the same tree. An additional advantage of BOAT is that it can be used for incremental updates. That is, BOAT can take new insertions and deletions for the training data and update the decision tree to reflect these changes, without having to reconstruct the tree from scratch.