Representations Of Graphs
Representations of graphs: There are two standard ways to represent a graph G = (V, E): as a collection of adjacency lists or as an adjacency matrix. Either way is applicable to both directed and undirected graphs. The adjacency-list representation is usually preferred, because it provides a compact way to represent sparse graphs-those for which |E| is much less than |V|2. Most of the graph algorithms presented in this book assume that an input graph is represented in adjacency-list form. An adjacency-matrix representation may be preferred, however, when the graph is dense-|E| is close to |V|2-or when we need to be able to tell quickly if there is an edge connecting two given vertices. For example, two of the all-pairs shortest-paths algorithms presented in All-Pairs Shortest Paths assume that their input graphs are represented by adjacency matrices.
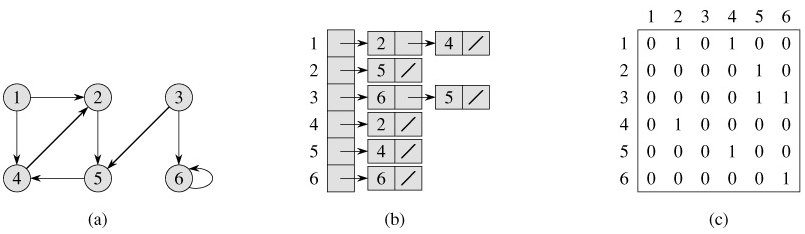
The adjacency-list representation of a graph G = (V, E) consists of an array Adj of |V| lists, one for each vertex in V . For each u ∈ V, the adjacency list Adj[u] contains all the vertices v such that there is an edge (u, v) ∈ E. That is, Adj[u] consists of all the vertices adjacent to u in G. (Alternatively, it may contain pointers to these vertices.) The vertices in each adjacency list are typically stored in an arbitrary order. Figure 22.1(b) is an adjacency-list representation of the undirected graph in Figure 22.1(a). Similarly, Figure 22.2(b) is an adjacency-list representation of the directed graph in Figure 22.2(a).
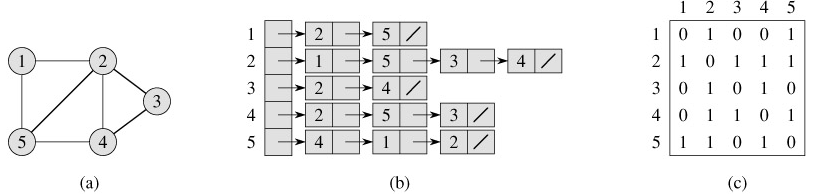
Figure 22.1: Two representations of an undirected graph. (a) An undirected graph G having five vertices and seven edges. (b) An adjacency-list representation of G. (c) The adjacency-matrix representation of G.
If G is a directed graph, the sum of the lengths of all the adjacency lists is |E|, since an edge of the form (u, v) is represented by having v appear in Adj[u]. If G is an undirected graph, the sum of the lengths of all the adjacency lists is 2 |E|, since if (u, v) is an undirected edge, then u appears in v's adjacency list and vice versa. For both directed and undirected graphs, the adjacency-list representation has the desirable property that the amount of memory it requires is Θ(V E).
Adjacency lists can readily be adapted to represent weighted graphs, that is, graphs for which each edge has an associated weight, typically given by a weight function w : E → R. For example, let G = (V, E) be a weighted graph with weight function w. The weight w(u, v) of the edge (u, v) ∈ E is simply stored with vertex v in u's adjacency list. The adjacency-list representation is quite robust in that it can be modified to support many other graph variants.
A potential disadvantage of the adjacency-list representation is that there is no quicker way to determine if a given edge (u, v) is present in the graph than to search for v in the adjacency list Adj[u]. This disadvantage can be remedied by an adjacency-matrix representation of the graph, at the cost of using asymptotically more memory.
For the adjacency-matrix representation of a graph G = (V, E), we assume that the vertices are numbered 1, 2,..., |V| in some arbitrary manner. Then the adjacency-matrix representation of a graph G consists of a |V| × |V| matrix A = (aij) such that
Figures 22.1(c) and 22.2(c) are the adjacency matrices of the undirected and directed graphs in Figures 22.1(a) and 22.2(a), respectively. The adjacency matrix of a graph requires Θ(V2) memory, independent of the number of edges in the graph.
Observe the symmetry along the main diagonal of the adjacency matrix in Figure 22.1(c). We define the transpose of a matrix A = (aij) to be the matrix  given by
given by  . Since in an undirected graph, (u, v) and (v, u) represent the same edge, the adjacency matrix A of an undirected graph is its own transpose: A = AT. In some applications, it pays to store only the entries on and above the diagonal of the adjacency matrix, thereby cutting the memory needed to store the graph almost in half.
. Since in an undirected graph, (u, v) and (v, u) represent the same edge, the adjacency matrix A of an undirected graph is its own transpose: A = AT. In some applications, it pays to store only the entries on and above the diagonal of the adjacency matrix, thereby cutting the memory needed to store the graph almost in half.
Like the adjacency-list representation of a graph, the adjacency-matrix representation can be used for weighted graphs. For example, if G = (V, E) is a weighted graph with edge-weight function w, the weight w(u, v) of the edge (u, v) ∈ E is simply stored as the entry in row u and column v of the adjacency matrix. If an edge does not exist, a NIL value can be stored as its corresponding matrix entry, though for many problems it is convenient to use a value such as 0 or ∞.
Although the adjacency-list representation is asymptotically at least as efficient as the adjacency-matrix representation, the simplicity of an adjacency matrix may make it preferable when graphs are reasonably small. Moreover, if the graph is unweighted, there is an additional advantage in storage for the adjacency-matrix representation. Rather than using one word of computer memory for each matrix entry, the adjacency matrix uses only one bit per entry.