Force Sensor Location
Force Sensor Location
In force feedback control, the location of the force sensor with respect to the location of actuation can have a crucial effect on system performance, stability in particular.
For example, in robotic manipulator applications, it has been experienced that with some locations and configurations of a force-sensing wrist at the robot end effector, dynamic instabilities were present in the manipulator response for some (large) values of control gains in the force feedback loop.
These instabilities were found to be limit-cycle-type motions in most cases.
Generally, it is known that when the force sensors are more remotely located with respect to the drive actuators of a mechanical system, the system is more likely to exhibit instabilities under force feedback control. Hence, it is desirable to make force measurements very close to the actuator locations when force feedback is used.
Consider a mechanical processing task. The tool actuator generates the processing force, which is applied to the workpiece. The force transmitted to the workpiece by the tool is measured by a force sensor and is used by a feedback controller to generate the correct actuator force.
The machine tool is a dynamic system, which consists of a tool subsystem (dynamic) and a tool actuator (dynamic). The workpiece is also a dynamic system.
Relative location of the tool actuator with respect to the force sensor (at the toolworkpiece interface) can affect stability of the feedback control system. In general, the closer the actuator to the sensor the more stable the feedback control system. this can determine the stability of the overall control system. In both cases the processing force at the interface between the tool and the workpiece is measured using a force sensor, and is used by the feedback controller to generate the actuator drive signal. In Figure (a) the tool actuator, which generates the drive signal of the actuator, is located right next to the force sensor. In Figure (b) the tool actuator is separated from the force sensor by a dynamic system of the processing machine.
It is known that the arrangement (b) in the Figure is less stable than arrangement in Figure (a).
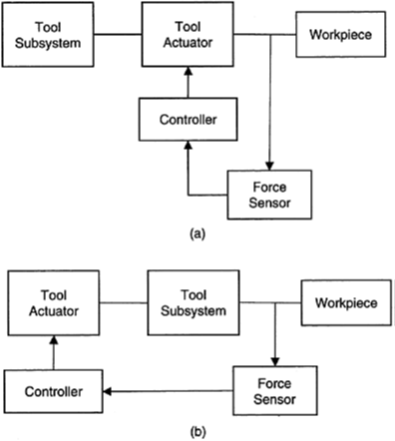
(a) Force sensor located next to the actuator, (b) Force sensor separated from the actuator by a dynamic
subsystem.
Arrangement in Figure (b) introduces more dynamic delay into the feedback control loop. It is well known that the time delay has a destabilizing effect on feedback control systems, particularly at high control gains. The root locus method is useful in stability studies of this type.