←
Mechatronics
Friction And Backlash
Friction and Backlash
Modeling and computing the joint forces are often necessary for control of a manipulator.
In these situations, bearing friction and gear friction are usually represented by equivalent viscous friction models, and usually backlash is completely neglected.
These are not realistic assumptions, except for a few special types of manipulator; for instance, backlash is negligible in direct-drive arms.
An accurate computation of the inverse dynamics would necessitate more realistic models.
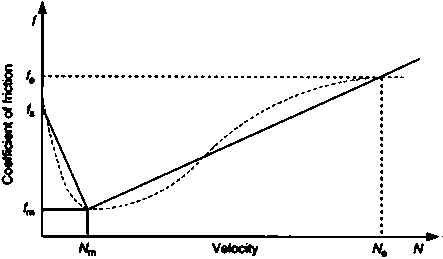
A realistic friction model for robotic manipulator joints the coefficient of friction is defined such that its product with an equivalent joint reaction