Newton-euler Formulation
Newton-Euler Formulation
 For the sake of clarity, the manipulator is assumed to be an open-link chain, having revolute joints. The development can be extended to other types of manipulators in a straightforward manner.
For the sake of clarity, the manipulator is assumed to be an open-link chain, having revolute joints. The development can be extended to other types of manipulators in a straightforward manner.
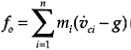
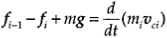
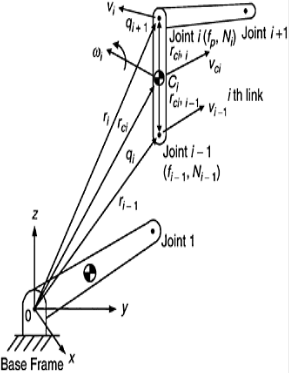
Consider the ith link of an n-link manipulator, as shown in Figure. The Newton-Euler equations for this link consist of the force momentum equations:
and the moment-angular momentum equations about the centroid Ci of the link:

The following notation has been used:
ƒi-1=force vector at the i-1th joint of the ith link.
Ni-1=moment (torque) vector at the i-1th joint of the ith link.
g=vector representing acceleration due to gravity.
mi=mass of the ith link.
Ici=moment of inertia matrix of the ith link about Ci.
uci=velocity of the centroid of the ith link.
wi=angular velocity vector of the ith link.
ra,b=position vector from point a to point b.
Next, by substituting: