Permanent-magnet Ac Tachometer
Permanent-Magnet AC Tachometer
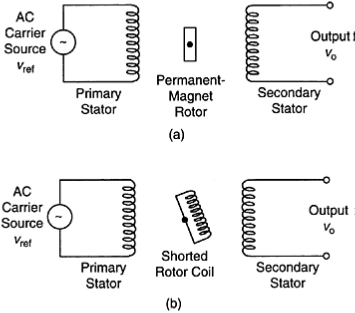
This device has a permanent magnet rotor and two separate sets of stator windings as schematically shown in Figure (a).
One set of windings is energized using an ac reference (carrier) voltage. Induced voltage in the other set of windings is the tachometer output.
When the rotor is stationary or moving in a quasi-static manner, the output voltage is a constant amplitude signal much like the reference voltage.
As the rotor moves at a finite speed, an additional induced voltage, which is proportional to the rotor speed, is generated in the secondary winding.
This is due to the rate of change of flux linkage into the secondary coil from the rotating magnet. The overall output from the secondary coil is an amplitudemodulated signal whose amplitude is proportional to the rotor speed.
For transient velocities, it will be necessary to demodulate this signal in order to extract the transient velocity signal (i.e., the modulating signal) from the overall (modulated) output. The direction of velocity is determined from the phase angle of the modulated signal with respect to the carrier signal.
Note that in an LVDT, the amplitude of the ac magnetic flux (linkage) is altered by the position of the ferromagnetic core.
But in an ac permanent-magnet tachometer, a dc magnetic flux is generated by the magnetic rotor, and when the rotor is stationary it does not induce a voltage in the coils.
The flux linked with the stator windings changes due to the rotation of the rotor, and the rate of change of linked flux is proportional to the speed of the rotor. For low-frequency applications (5 Hz or less), a standard ac supply at line frequency (60 Hz) may be adequate to power an ac tachometer.
For moderate-frequency applications, a 400 Hz supply may be used.
For high frequency (high-bandwidth) applications a high frequency signal generator (oscillator) may be used as the primary signal.
In high-bandwidth applications, carrier frequencies as high as 1.5 kHz are commonly used.
Typical sensitivity of an ac permanent-magnet tachometer is on the order of 50–100 mV/rad/s.