Monitoring
Monitoring problems may be solved by using a simple neural network model or a hierarchical and modular neural network model. In the former case, the input nodes take data for the current situation. The output activation signals represent values for the monitored parameters. The network has to be trained with enough examples of the monitoring process. Such a task could be the monitoring of a car for which a simple neural network can be trained subject to enough data available for the input parameters the cooling temperature, status of the gauge, status of the brakes and for the output variable level of risk for the driver.
In the latter case, layers of neural networks may need to be used, each performing a different task. For example, bedside critical care monitoring of patients in intensive care may require a complex neural network to recognize dynamic states of several events occurring over a short or long period of time and predicting a dangerous state, such as heart failure, etc. Snapshots are not enough in this case. They contain local information only. It is necessary to observe two or more successive snapshots in their order of occurrence. In this case, two connectionist modules are required:
(1) Short-term memory, to represent temporal information
(2) A categorization unit, to recognize and categorize dynamic temporal patterns of events which may happen in the future.
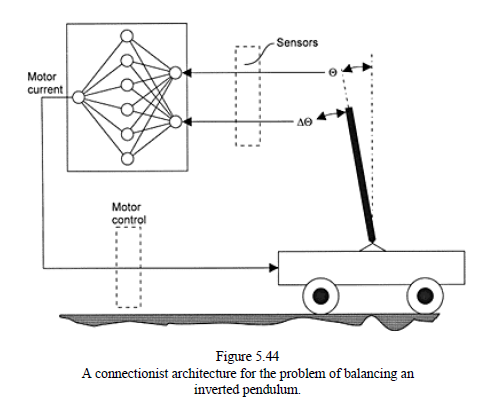
Control:-Control is similar to the monitoring task, but here signals that change the status of the object under control are to be emitted. Figure shows the structure of amp network for the Inverted Pendulum Problem. The network is trained in a supervised manner by sufficient number of input-output pairs of data. The network will perform the control task as well as the fuzzy control system did, as both of them gently approximate the same control (goal) function when it is not known in advance. Both control systems are robust.
The difficulties in articulating the membership functions for the fuzzy sets in the fuzzy control rules may give superiority to hybrid fuzzy connectionist models. A crucial point in building connectionist systems for control is time synchronization. The control process is not only about mapping input vectors to output vectors but about mapping them on the time scale.