Spline Function
An interpolation method in which cell values are estimated using a mathematical function that minimizes overall surface curvature, resulting in a smooth surface that passes exactly through the input points.
A spline function consists of polynomial pieces on subintervals joined together with certain continuity conditions. Formally, suppose that n 1 points
t0, t1, · · · , tn have been specified and satisfy t0 < t1 < · · · < tn
These points are called knots.
A spline of degree 0 can be given explicitly in the form
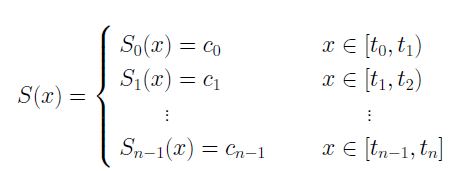
The intervals [ti-1, ti) do not intersect each other, and so no ambiguity arises in defining such a function at the knots.
A spline function of degree n with nodes x0, x1, ..., xn, is a function F(x) satisfying the following properties.
(i) F(xi) = f(xi), i = 0, 1, ...., n. (Interpolation conditions).
(ii) On each subinterval [xi-1, xi], 1 ≤ i ≤ n, F(x) is a polynomial of degree n.
(iii) F(x) and its first (n – 1) derivatives are continuous on (a, b).
On each interval, we have four unknowns ai, bi, ci and di, i = 1, 2, ..., n. Therefore, the total number of unknowns is 4n.
Continuity of F(x), F′(x) and F″(x) on (a, b) implies the following.
(i) Continuity of F(x) :
On

On

(ii) Continuity of F′(x) :

(iii) Continuity of F″ (x) :

At the end points x0 and xn, we have the interpolation conditions

and
