Two-level Scheduler
Two-Level Scheduler: According to the two-level priority-driven scheme described in Section 7.9, each real-time application (denoted by Tk for some k ≥ 1) is executed by a bandwidth-preserving server Sk , which in essence is a constant utilization or total bandwidth server, and all the nonreal-time applications are executed by a total bandwidth server S0. At the lower level, the OS scheduler maintains the servers and schedules all the ready servers. (A server is ready when it has ready threads to execute and budget to execute them.) At the higher level, the server scheduler of each server Sk schedules the ready threads in the application(s) executed by the server.
Scheduling Hierarchy. At each scheduling decision time, the OS scheduler schedules the server with the earliest deadline among all ready servers.When a server is scheduled, it executes the thread chosen by its own server scheduler according to the scheduling algorithm  used by the application(s) executed by the server. The block diagram in Figure 12–10 depicts this scheduling hierarchy. To highlight the fact that the scheduling disciplines used by the real-time applications may be different, the block diagram shows two different real-time scheduling disciplines. Nonreal-time applications are scheduled according to a time-shared scheduling discipline. The block diagram also suggests that we put all the schedulers in the
used by the application(s) executed by the server. The block diagram in Figure 12–10 depicts this scheduling hierarchy. To highlight the fact that the scheduling disciplines used by the real-time applications may be different, the block diagram shows two different real-time scheduling disciplines. Nonreal-time applications are scheduled according to a time-shared scheduling discipline. The block diagram also suggests that we put all the schedulers in the
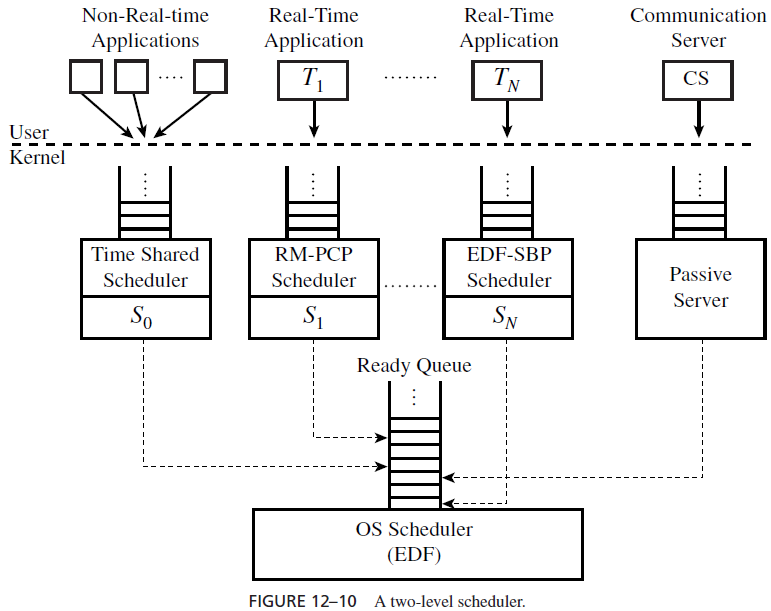
kernel; thus, only one context switch occurs at each scheduling decision time, just as in a one-level scheduling scheme.
An application can use any protocol to control access to its local resources. In this section, by a local resource, we mean one that is used by only one application. A resource shared by multiple applications is a global resource. In the open system, global resource contention is resolved according to the Nonpreemptable Critical Section (NPS) protocol or the ceilingpriority protocol. Consequently, a section of a thread may be nonpreemptable. In general, a thread or a section of a thread may be nonpreemptable for reasons other than global resource access control. There is no need for us to distinguish the reasons. Hereafter, we simply say that some applications have nonpreemptable sections, lumping applications that use global resources into this category.
Without loss of generality, we assume that the required capacity sk of every real-time application Tk is less than 1. (Otherwise the application cannot share the processor with other applications.) The maximum execution time of every thread in each real-time application becomes known when the thread is released. One of the parameters a real-time application declares to the operating system when it requests to execute in the real-time mode is the maximum execution time of the nonpreemptable sections of all its threads. After admitting the application, the operating system never allows any thread in the application to be nonpreemptable for more than the declared amount of time. Similarly, the operating system ensures that no nonreal-time thread is nonpreemptable for longer than a certain length of time. (This length is a design parameter.) Consequently, at any time the maximum execution time of the nonpreemptable sections of all threads in the system is known.
In Section 7.9, we called an application that is scheduled according to a preemptive, priority-driven algorithm and contains threads whose release times are not fixed a nonpredictable application. It is so called because the OS scheduler needs to know the next event time of such an application at each server budget replenishment time but the server scheduler for the application cannot compute this time accurately. (At any time, the next event time of an application is the occurrence time of the earliest of all events in the applications that may cause a context switch.) Applications whose threads have fixed and known release times and applications that are scheduled nonpreemptively are predictable. An application of the former kind is predictable because its server scheduler can compute the next event time accurately. Similarly, an application that is scheduled in the clock-driven manner is predictable. A nonpreemptively scheduled application is predictable, even when it contains aperiodic and sporadic threads, because this computation is not necessary.
Operations of the OS scheduler. Figure 12–11(a) describes the operations of the OS scheduler and its interaction with the server schedulers. At initialization time, the OS scheduler creates a total bandwidth server S0 to execute all the nonreal-time applications and a server for each service provider. The size of S0 is ˜ u0, and the total size of the servers for all system service providers is ˜ u p. The total size ![]() of these servers is the processor utilization that is no longer available to real-time applications.
of these servers is the processor utilization that is no longer available to real-time applications.
Scheduling NonReal-Time Applications. Again, the server scheduler of S0 schedules all the nonreal-time threads according to a time-sharing scheduling algorithm.We let x denote