Taxonomy Of Learning Systems
Taxonomy of Learning Systems: Several classification of learning systems are possible based on the above components as follows:
Goal/Task/Target Function:: Prediction: To predict the desired output for a given input based on previous input/output pairs. E.g., to predict the value of a stock given other inputs like market index, interest rates etc.
Categorization: To classify an object into one of several categories based on features of the object. E.g., a robotic vision system to categorize a machine part into one of the categories, spanner, hammer etc based on the parts’ dimension and shape.
Clustering: To organize a group of objects into homogeneous segments. E.g., a satellite image analysis system which groups land areas into forest, urban and water body, for better utilization of natural resources.
Planning: To generate an optimal sequence of actions to solve a particular problem. E.g., an Unmanned Air Vehicle which plans its path to obtain a set of pictures and avoid enemy anti-aircraft guns.
Models:
• Propositional and FOL rules
• Decision trees
• Linear separators
• Neural networks
• Graphical models
• Temporal models like hidden Markov models
Learning Rules: Learning rules are often tied up with the model of learning used. Some common rules are gradient descent, least square error, expectation maximization and margin maximization.
Experiences:
Learning algorithms use experiences in the form of perceptions or perception action pairs to improve their performance. The nature of experiences available varies with applications. Some common situations are described below.
- Supervised learning: In supervised learning a teacher or oracle is available which provides the desired action corresponding to a perception. A set of perception action pair provides what is called a training set. Examples include an automated vehicle where a set of vision inputs and the corresponding steering actions are available to the learner.
- Unsupervised learning: In unsupervised learning no teacher is available. The learner only discovers persistent patterns in the data consisting of a collection of perceptions. This is also called exploratory learning. Finding out malicious network attacks from a sequence of anomalous data packets is an example of unsupervised learning.
- Active learning: Here not only a teacher is available, the learner has the freedom to ask the teacher for suitable perception-action example pairs which will help the learner to improve its performance. Consider a news recommender system which tries to learn an users preferences and categorize news articles as interesting or uninteresting to the user. The system may present a particular article (of which it is not sure) to the user and ask whether it is interesting or not.
- Reinforcement learning: In reinforcement learning a teacher is available, but the teacher instead of directly providing the desired action corresponding to a perception, return reward and punishment to the learner for its action corresponding to a perception. Examples include a robot in a unknown terrain where its get a punishment when its hits an obstacle and reward when it moves smoothly.
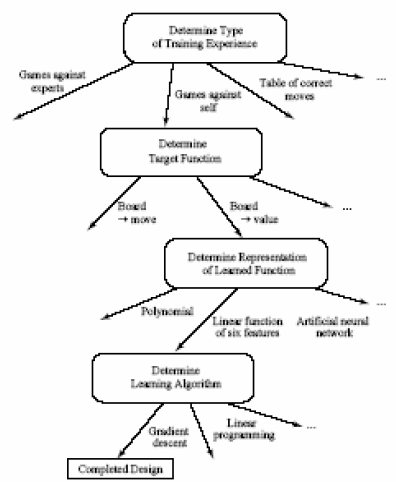
In order to design a learning system the designer has to make the following choices based on the application.