←
Control Systems - 1
Determination Of Static Position Error Constants
Determination of static position error constants
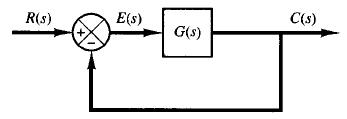
Fig: 1 Unity-feedback control system
Consider the unity feedback control system shown in Figure 1. Assume that the open-loop transfer function is given by


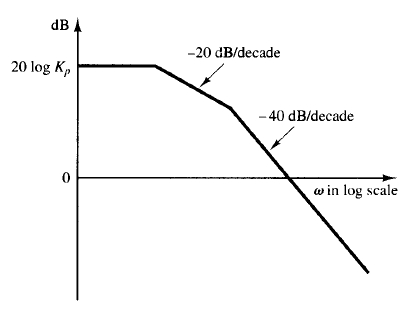
Fig: 2 Log-magnitude curve of a type 0 system
Figure 2 shows an example of the log-magnitude plot of a type 0 system. In such a system, the magnitude of G(jω) equals Kp at low frequencies, or
It follows that the low-frequency asymptote is a horizontal line at 20 log Kp dB.